Robot-állat interakció, mint új kutatási módszer

A viselkedésökológiai definíció szerint a szociális interakció két azonos fajhoz tartozó egyed között zajló társas tevékenység, melynek pozitív hatása van az egyedek túlélésére (Székely et al., 2010). Ez a megközelítés feltételezi, hogy a társas viselkedések erős szelekció alatt állnak, és az evolúció során úgy alakultak ki, hogy növeljék az egyedek túlélési valószínűségét. Funkcionális szinten sokféle célt szolgálhatnak, mint például a megfelelő partner kiválasztása, a ragadozó csoportos elkerülése vagy éppen elriasztása, más esetekben a zsákmány közös elejtése. Ezek a társas viselkedési formák széles körben megtalálhatók az állatvilágban, és gyakran hasonló módon nyilvánulnak meg. Az állatok közti kommunikációs jelzések például fajonként eltérőek lehetnek, ám rokon fajok vagy ugyanolyan környezeti hatásoknak kitett, egymástól genetikailag távol álló fajok jelzéseiben felfedezhetőek hasonlóságok (Miklósi – Gácsi, 2012).
A szociális interakció vizsgálata makettekkel
Az etológia egyik fontos területe a szociális interakciók funkciójának és mechanizmusának vizsgálata, különös tekintettel a fent említett hasonlóságokra és eltérésekre. Ugyanakkor az ilyen társas kölcsönhatások kísérletes megközelítése számos nehézségbe ütközik: (1) a szociális interakció minimum két egyed jelenlétét feltételezi, melyek viselkedését nehéz befolyásolni és szabályozni, (2) a fent leírt okok miatt a kísérletet nehéz standardizálni és megismételni, (3) illetve nehezen szűrhetők ki a vizsgált egyedek előzetes társas tapasztalatai és elvárásai, melyek hatással lehetnek a megfigyelt interakcióra (Krause et al., 2011). Ezekre a problémákra megoldást jelenthet mesterséges ingerek vagy tárgyak (ún. makettek) partnerként való használata, melyek bizonyos mértékig hasonlítanak a vizsgált faj egyedeihez. Ezt a módszert már a korai etológusok, köztük Nikolaas Tinbergen is használta különböző fajok udvarlási és territoriális viselkedésének vizsgálatakor, melynek során kiderült, hogy az ilyen sematikus modellek az élő fajtársakhoz hasonló mértékben képesek kiváltani az egyedek szociális viselkedését (Tinbergen, 1951). Ezzel az egyszerű és ötletes módszerrel lehetővé vált olyan ún. kulcsingerek meghatározása is, amelyek feltétlenül szükségesek az adott társas viselkedés aktiválásához. Napjainkban az etológusok a mérnökök segítségével olyan önállóan vagy távirányítással mozgatható komplex modellek (robotok) létrehozásán dolgoznak, melyek alkalmasak arra, hogy a vizsgált faj egyedeivel interakcióba lépjenek.
A robotok szociális partnerként való használata növeli a kísérlet kontrollálhatóságát és ismételhetőségét, ezen kívül lehetőség nyílik arra, hogy a szociális partner viselkedésének és külső megjelenésének hatását külön-külön vizsgálják, ami élő egyedek alkalmazása esetén nehezen kivitelezhető (Krause et al., 2011). Ezeket az előnyöket felismerve és kihasználva számos vizsgálatban alkalmaztak már kisebb-nagyobb mértékben távolról működtetett robotokat különböző fajoknál.
Az egyik legkorábbi kutatásban Axel Michelsen és munkatársai (1992) méhek kommunikációját és a méhtánc kulcselemeit vizsgálták egy robotméh segítségével. Az eredmények számos tekintetben megerősítették a korábbi megfigyeléseket, miszerint a kaptárba visszatérő felderítő méh egy speciális tánc révén tájékoztatja társait a begyűjthető táplálék térbeli lelőhelyéről és minőségéről. A táncot elemeire bontva kimutatták, hogy az ún. nyolcas tánc közepére eső „riszáló” szakasz hordozza a legfontosabb információt, illetve a közben kiadott hang a tánccal együtt utal az élelem helyére és távolságára.
Egy másik állati kommunikációt vizsgáló kísérletben egy robotmókus segítségével derítették ki, hogy a vészjelzés leadásának akusztikus és vizuális elemei egyaránt fontosak a fajtársak számára (Partan et al., 2009).
 Kanadai kutatók egy életnagyságú robotkutya segítségével vizsgálták, hogy miképp reagálnak a kutyák a különböző mértékű és mozgású farokcsóválásra. Eredményeik szerint a hosszú és csóválható farkú robot sokkal alkalmasabb volt a magabiztos belső állapot jelzésére, mint a rövid mozgó vagy mozdulatlan farokkal rendelkező modell (Leaver – Reimchen, 2008).
Kanadai kutatók egy életnagyságú robotkutya segítségével vizsgálták, hogy miképp reagálnak a kutyák a különböző mértékű és mozgású farokcsóválásra. Eredményeik szerint a hosszú és csóválható farkú robot sokkal alkalmasabb volt a magabiztos belső állapot jelzésére, mint a rövid mozgó vagy mozdulatlan farokkal rendelkező modell (Leaver – Reimchen, 2008).
 Szintén kutyákkal végzett szociális interakciós tesztben Kubinyi Enikő és munkatársai (2004) kimutatták, hogy felnőtt családi kutyák hajlamosabbak interakcióba lépni egy robotkutyával, ha az szőrrel borított, ugyanakkor minden robotnál jobban felkelti az érdeklődésüket az élő kölyökkutya-partner.
Szintén kutyákkal végzett szociális interakciós tesztben Kubinyi Enikő és munkatársai (2004) kimutatták, hogy felnőtt családi kutyák hajlamosabbak interakcióba lépni egy robotkutyával, ha az szőrrel borított, ugyanakkor minden robotnál jobban felkelti az érdeklődésüket az élő kölyökkutya-partner.
A fajtársak távirányítású vagy önműködő robotokra való lecserélése valójában a korábbi fa- vagy papírmakettek használatának modernizált változata. Bár ez a módszer önmagában nem jelent koncepcionális újdonságot, jó lehetőséget teremt arra, hogy az amúgy bonyolult és összetett szociális interakciókat viselkedéselemekre lehessen bontani. Így lehetővé válik, hogy szisztematikus kísérletekkel derítsenek fényt az egyes komponensek fontosságára, hatására és a köztük lévő hierarchiára.
Nem minden a külső
A fent bemutatott vizsgálatokban a kutatók törekedtek rá, hogy a partnerként használt robot külsőleg minél jobban hasonlítson a vizsgált faj egyedeire, habár nem tudható, vajon milyen mértékben tekintették a megfigyelt egyedek a robotot fajtársnak. Bármennyire is hasonlít a megfigyelő kutató szempontjából az ilyen robotmakett egy fajtársra, számos rejtett különbség létezhet, amelyek elkerülik a kutató figyelmét; az ilyen robotoknak például eltérő lehet a szaguk, vagy viselkedésük közben a beépített motor által keltett zaj is megzavarhatja az érdeklődő fajtársat.
Az ember esetében jól ismert jelenség, hogy az emberhez nagymértékben hasonló, de valamilyen lényeges tekintetben mégis eltérő lény vagy tárgy elkerülést vált ki. Sokan ezzel magyarázzák a halottaktól való félelmet is, vagy éppen a különböző kitalált, emberszerű szörnyek iránti, érdeklődéssel egybekötött viszolygást.
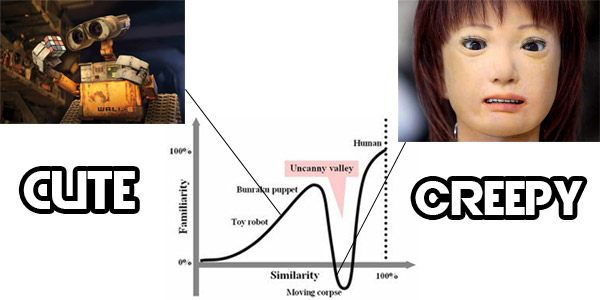 A japán Masahiro Mori a robotfejlesztők számára a jelenséget a borzongások "völgye” allegóriájával igyekezett szemléletessé tenni. Mori állítása szerint azért veszélyes az emberhez hasonlító robotokat előállítani, mert a tökéletesedési fázis közben, az emberre már nagyon hasonlító robotok inkább elkerülést és félelmet váltanak ki az emberekből, mintsem vonzalmat (lásd például Walters et al., 2004).
A japán Masahiro Mori a robotfejlesztők számára a jelenséget a borzongások "völgye” allegóriájával igyekezett szemléletessé tenni. Mori állítása szerint azért veszélyes az emberhez hasonlító robotokat előállítani, mert a tökéletesedési fázis közben, az emberre már nagyon hasonlító robotok inkább elkerülést és félelmet váltanak ki az emberekből, mintsem vonzalmat (lásd például Walters et al., 2004).
 Masahiro Mori
Masahiro Mori
A kismértékben eltérő fajspecifikus jellegekre mutatott különleges érzékenységre az állatok körében is akad példa, és sokan arra gondolnak, hogy az ilyen képességnek evolúciós okai lehetnek, például a hasonló, de más fajhoz tartozó egyedek elkerülése.
Érthető okokból a viselkedés mindig valamilyen testhez kötött, ugyanakkor mégis felmerül a kérdés, hogy a test önmagában milyen jelentőséggel bír a másikkal való interakció során. A kérdés pontosabban úgy is megfogalmazható, hogy milyen mértékben ismerhető fel a viselkedés a testtől függetlenül, és az ilyen felismerési képesség mennyire terjedt el az állatvilágban, illetve egyes elméket tekintve hol vannak a határai (Pfeifer – Scheiher, 1999). A technika fejlődésével ez az elméleti kérdés is bizonyos mértékig vizsgálhatóvá válhat.
A különböző robotok használata jó lehetőséget nyújt a fenti kérdés tisztázására állatoknál is. Vajon az élőlények képesek-e felismerni egy viselkedésmintázatot és megfelelően reagálni rá, függetlenül a partner megjelenésétől? A robotpartner viselkedésének és megjelenésének szisztematikus szétválasztásával lehetőség nyílik arra, hogy megvizsgáljuk, milyen mértékben hajlandó az élőlény szociális interakcióba lépni a „mechanikus” partnerrel, és mely külső-belső tényezők befolyásolják ezt a hajlandóságot. E módszer alkalmazása felfedheti az állati elme rugalmasságát, evolúciós és egyedfejlődési faktorait. Feltételezhetjük, hogy az ilyen viselkedés-felismerésnek lehetnek genetikai alapjai; korábbi kutatások is utalnak arra, hogy egyes fajok (például a paradicsomhal) teljes szociális izolációban felnőtt egyedei bizonyos esetekben minden korábbi tapasztalat nélkül képesek felismerni a másik által mutatott társas viselkedésformákat. Másfelől azonban a tapasztalatnak, különösen a másik fajtárssal történt korábbi interakciónak döntő szerepe lehet a szociális viselkedés specifikus elemeinek felismerésében és a megfelelő válasz kialakításában.
A robotok használatán alapuló módszer lényege, hogy a kérdéses szociális viselkedésformát az adott alany számára egy olyan ágens mutatja be, amellyel az illető korábban nem találkozhatott. Ebben az esetben a korai tapasztalat hatása csak közvetett módon érvényesülhet, azaz az alanynak valamilyen módon képesnek kell lennie általánosítani a szociális viselkedésre vonatkozó ismereteit a sikeres együttműködés érdekében. A kutató a mesterséges ágens, illetve az alany közötti szociális interakció kialakulásának sebességéből, komplexitásából és hosszabb távú fennmaradásából következtethet az élő elme működésének szabályaira. Mivel az ilyen mesterséges ágensek bármilyen formájúak lehetnek, amellett, hogy a kísérleti alany számára ismeretlenek, a továbbiakban Azonosítatlan Mozgó Tárgyként (AMoT) hivatkozunk rájuk. A tudományos fantasztikus irodalomban jártasak számára az AMoT fogalma ismerős lehet, hiszen a földönkívüli idegenekre régóta használják az UFO megnevezést, ami magyarra fordítva azonosítatlan repülő tárgyat jelent (unidentified flying object). A fent leírt kérdés valójában az emberrel kapcsolatban is felvethető: Hogyan képes arra az ember, hogy egy ismeretlen lény viselkedését felismerje, céljait és szándékait azonosítsa? Az UFO-kkal való esetleges találkozás megvalósulásáig a társrobotokkal való szociális interakció vethet fel hasonló problémákat. Ennek szellemében az állat–robot interakció tudományos kutatása az emberi elme működésének egy speciális esetét is jelenti.
A kutya mint az állat–robot interakciókutatás ideális alanya
A kutya (Canis familiaris) az utóbbi húsz évben az etológiai kutatások közkedvelt alanyává vált mint az emberi viselkedés modellállata (Topál et al., 2009). A kutya a legrégebben háziasított állat, amely a legszerényebb becslések szerint is 18–32 000 éve él az emberrel azonos környezetben (Coppinger – Coppinger, 2001). A valamikor élt farkasok leszármazottai a domesztikáció során számos olyan szociális képességre tettek szert, melyek lehetővé tették, hogy sikeresen beilleszkedjenek az emberi közösségbe (Kubinyi et al., 2007). Sok vizsgálat bizonyítja például, hogy a kutyák hatékonyan alkalmaznak olyan ember által használt kommunikációs jelzéseket, mint a tekintet iránya vagy a mutatás. A kutya–ember közti szociális interakció jó példa arra, hogy kialakulhat két különböző faj egyedei között is társas kapcsolat, melyben minkét fél képes értelmezni a másik jelzéseit. A ember közelében felnőtt kutyák sok mindent képesek az embertől eltanulni, és viszonylag könnyen és szívesen működnek együtt vele. Jó bizonyítékot nyújtanak erre a világon mindenütt dolgozó vakvezető vagy mozgássérült-segítő kutyák tízezrei.
A háziasítás egyik fontos alapvetése, hogy a kutya egy olyan szociális partnerrel él együtt, aki sem kinézetében, sem viselkedésében nem hasonlít rá. Egyelőre nem világos, hogy a kutyák fajok közötti szociális interakcióra való képessége milyen mértékben köszönhető a háziasítás során bekövetkezett változásoknak, illetve az egyedi szocializáció hatásának. Ettől függetlenül azonban joggal feltételezzük, hogy a kutyát az ember irányába mutatott rugalmas szociális viselkedése megfelelő és ígéretes alannyá teszi olyan vizsgálatok számára, melyekben egy külsőre sem kutyára, sem emberre nem hasonlító mozgó tárgy a partner. A kutya további előnye, hogy az emberi környezetben élve hozzá van szokva különféle furcsa tárgyakhoz, így várhatóan egy ismeretlen AMoT sem vált ki erős elkerülést. Elképzelésünk szerint, amikor a kutya egy AMoT-tal találkozik, kénytelen azokból a tapasztalatokból kiindulni, amelyeket korábban az emberrel vagy saját fajtársaival kapcsolatos szociális interakciók során szerzett. A fő kérdés, hogy amennyiben az AMoT bizonyos, a kutya számára felismerhető viselkedésformákat mutat, képes-e a kutya ezeknek megfelelően viselkedni. A kutyaelme működésének rugalmasságára a kialakuló szociális interakció hatékonysága utal, illetve az a hasonlóság, amely egy ilyen mesterséges helyzet, valamit a kutya–ember interakció között fennáll. Éppen ezért az ilyen kísérletek fontos eleme egy olyan kontrollcsoport, amely lehetőséget nyújt a kutya–AMoT és a kutya–ember interakció összehasonlítására.
Kutya–AMoT interakció: az első kísérlet
Vizsgálatunk során a fent tárgyalt elképzelésünket igyekeztünk kísérletes úton bizonyítani egy olyan problémamegoldó helyzetben, ahol a kutyák nem férhettek hozzá a kísérletvezető által elrejtett jutalomhoz (Gergely et al., 2013). Egy korábbi vizsgálat szerint ilyen helyzetekben a kutyák hosszan néznek a gazdára, illetve nézésváltásokkal jelzik a jutalom helyét. A gazdák az ilyen viselkedést korábbi tapasztalataik alapján kérő viselkedésnek tekintik, és mind a hétköznapi életben, mind a kísérleti helyzetben segítenek a kutyának a jutalom megszerzésében (Miklósi et al., 2000). Az AMoT-tal végzett megfigyeléssorozatban is a fenti módszert követtük, azzal az eltéréssel, hogy a rejtő és a segítő szociális partner szerepét is a robotra bíztuk. A kísérleti elrendezésben a fent leírtakat követve három csoportban három különböző segítő partner állt a kutyák rendelkezésére, de természetesen egy kutya csak az egyik partnerrel találkozott a próbák során. Mivel programozható robot valójában nem állt a rendelkezésünkre, és a végrehajtandó feladat igencsak bonyolult volt, AMoT-ként egy távirányítású kisautót használtunk (1. kép). A Mechanikus-AMoT-csoportban a kisautó mindig ugyanazon az útvonalon mozgott ugyanazzal a sebességgel, nem reagált a kutya viselkedésére és mindig ugyanannyi ideig maradt mozdulatlan. A kontrollként felállított Mechanikus-Ember csoportban a humán partner a Mechanikus-AMoT-hoz hasonlóan mozgott, sötét szemüveget viselt, hogy elkerülje a szemkontaktust a kutyával, és nem használt semmilyen verbális vagy nonverbális jelzést. Végül a Szociális-AMoT-csoportban a partner ugyanaz a távirányításos kisautó volt, ám itt különböző útvonalakon mozgott és állt meg, célorientált volt és interaktív (reagált a kutya viselkedésére), valamint szemeket viselt.
A tesztpróba elején a jutalomfalatot tartalmazó tálkát az adott partner elrejtette egy ketrec mélyébe, ahol a kutya nem tudott hozzáférni, majd megállt a tesztszobában. Ezek után a jelen lévő, de passzív gazda elengedte a kutyát, akinek fél perc állt rendelkezésére a jutalom megszerzéséhez. A kutyák hamar rájöttek, hogy a ketrecbe rejtett táplálékot nem érik el, így hamar fel is adták a próbálkozásokat. A két mechanikus csoportban a partnerek ez idő alatt végig mozdulatlanok maradtak, majd a fél perc elteltével elindultak a ketrec felé, kihozták a jutalmat, és odavitték a gazda mellett álló kutyának. A Szociális-AMoT esetében, ha a kutya a fél perc alatt ránézett vagy megérintette a kisautót, az rögtön elindult és kihozta a jutalmat a ketrecből. Minden csoport esetében hat egymást követő próbára került sor, majd a kísérlet közben készített videó segítségével elemeztük a kutya viselkedését.
 1. ábra: A kísérletben használt AMoT. A megfigyelések arra utalnak, hogy kutyák egy része bizonyos mértékig szociális társként kezelte az ismeretlen tárgyat.
1. ábra: A kísérletben használt AMoT. A megfigyelések arra utalnak, hogy kutyák egy része bizonyos mértékig szociális társként kezelte az ismeretlen tárgyat.
A két mechanikus csoportba sorolt kutyák meglepő módon igencsak hasonló szociális viselkedést mutattak az AMoT irányába, mint az ember partner felé. A próbák előrehaladtával a kutyák az AMoT-ra és az emberre is egyre többet néztek, és érdeklődésük inkább az AMoT-felé volt az erősebb. Hasonló hatás volt megfigyelhető a tekintetváltások és az érintések gyakoriságában is. Ezek a viselkedésformák az egyedi eltéréseket is figyelembe véve már az első próbákon megjelentek, és viszonylag hamar igen gyakorivá váltak. Ez arra utal, hogy a kutyák a korábbi, emberrel való tapasztalataikat gyorsan általánosították az új helyzetre, és legalábbis a viselkedést tekintve ugyanúgy „kértek” a kisautótól, mintha azt egy embertől tennék. Még feltűnőbb volt a viselkedésváltozás azokban a próbákban, ahol a kutyák a Szociális AMoT-tal találkoztak. A kutyák irányában reaktív viselkedést mutató AMoT (akkor indult el segíteni, ha a kutya előzőleg ránézett) a mechanikus társnál sokkal intenzívebb szociális reakciókat váltott ki a kísérlet alanyaiból. Ez különösen a Mechanikus-Ember csoportban lévő kutyákkal összevetve feltűnő. A kérő viselkedést tekintve, a kutyák mintegy kétszer-négyszer hatékonyabban „kértek” a szociális AMoT-tól, mint az embertől.
Az első kísérlet megerősítette elképzelésünket. A kutyák képesek voltak felismerni az AMoT szociális viselkedésének bizonyos aspektusait, noha az külsőre nem hasonlított sem kutyára, sem emberre. Természetesen számos vizsgálat szükséges még, hogy megtudjuk, vajon az interakció mely része kulcsfontosságú a kutyák szociális viselkedésének kiváltása szempontjából, de ez az első vizsgálat, amely bizonyítja, hogy a partner szociális viselkedése fontosabb lehet, mint a külseje.
A fent leírt kísérletből kiindulva és továbblépve több vizsgálatot is terveztünk, melyekben a kutyák szociális viselkedésének rugalmasságát és a korábbi tapasztalat hatását vizsgáltuk. Az egyik kísérletsorozatban a kísérletvezető a kutya tudtán kívül két rejtekhely egyikére rejt egy darab táplálékot. Az elrejtett táplálék helyét az AMoT „mutatja” meg a kutyának, oly módon, hogy egy rövid időre megközelíti a célt, majd újra messzebbre megy. Ezek után a kutya lehetőséget kap a két rejtekhely egyikének megközelítésére, és ha megtalálta, elfogyaszthatta a jutalmat. A megfigyelések azt mutatják, hogy a kutyák képesek az AMoT viselkedését egyfajta jelzésként értelmezni ebben a helyzetben, de csak akkor, ha korábban lehetőségük volt interakcióba lépni a mesterséges ágenssel.
Továbblépési lehetőségek: Turing-teszt kutyáknak
A fenti kísérletek csak az első lépések egy általánosabb módszertan és elmélet-megközelítés irányába. Természetesen az AMoT-ok potenciális skálája nagyon széles, a nyolc- vagy tízlábú polipszerű lényektől a rovarszerű repülő tárgyakig. Hagyományos kísérleti módszereket alkalmazó kísérletekben a kutatók mindig embereket használnak a kutyák szociális képességeinek tesztelésére. Ám e természetesnek tűnő megoldásnak számtalan hátránya is van, hiszen a kutya aktuális viselkedését, illetve teljesítményét nem lehet elválasztani az emberrel való korábbi tapasztalatától, illetve az aktuális kísérletben részt vevő személyek kutyára gyakorolt hatásától. Így az AMoT-ok egyik előnye éppen újdonságukban rejlik.
Egyelőre az AMoT-okat a kutatók kézzel irányítják, egy előre meghatározott szigorú leírás alapján. A jövő azonban egész más lehet, hiszen a cél az önműködően, a kutya, illetve más alany viselkedésére reagáló robotok használata. Érdemes észrevenni, hogy ebben az esetben a lényeg nem a kísérletvezető kiváltása, hanem egy olyan robotot irányító szoftveres alkalmazás létrehozása, amely a kutya számára potenciális szociális partnert jelenít meg egy AMoT formájában. Másképp megközelítve, a kutyaelme a szociális interakció során egy önállóan szabályozott mesterséges elmével kerül szembe. Ilyen értelemben az AMoT-tal való kísérletek megfeleltethetők a Turing-teszt egyfajta állati változatának. (A Turing-teszt azt méri, hogy egy mesterséges kognitív elme teljesítménye megkülönböztethető-e az ember elméjétől.) Ennek alapján az AMoT-t irányító szoftver akkor felel meg a Turing-teszt elvárásainak, ha működése a kutya szempontjából nem különböztethető meg egy élő ágens elméjének működésétől, például az emberétől vagy egy másik kutyáétól. Természetesen ettől az állapottól még nagyon messze vagyunk, ugyanakkor ezen eljárás révén felvetődik az állati elme modellezésének egy másik lehetősége, illetve pontosabban annak gyakorlati megvalósításának módja. A kutyaelme működésének fontos aspektusait tükrözné vissza egy olyan AMoT, amellyel a kutyák éppolyan komplex szociális viselkedési formák és interakciók kivitelezésére lennének képesek, mint az emberrel.
Gergely Anna, Miklósi Ádám (ELTE) 2015.
A teljes cikk hivatkozásokkal a Magyar Tudományban olvasható.